
Modern vehicles rely on sensors to understand their own state, surroundings, and performance. For decades, this capability has been built by adding hardware—dedicated components designed to measure specific physical properties. As vehicles have evolved, so has the number of sensors, leading to increasingly complex systems, where expanding functionality has traditionally involved adding or extending physical components.
But as the industry moves toward software-defined vehicles, that model is starting to shift. Instead of adding new hardware for every new function, it is increasingly possible to extract more value from the data vehicles already generate. This is where the distinction between hardware sensors and virtual sensors becomes important.
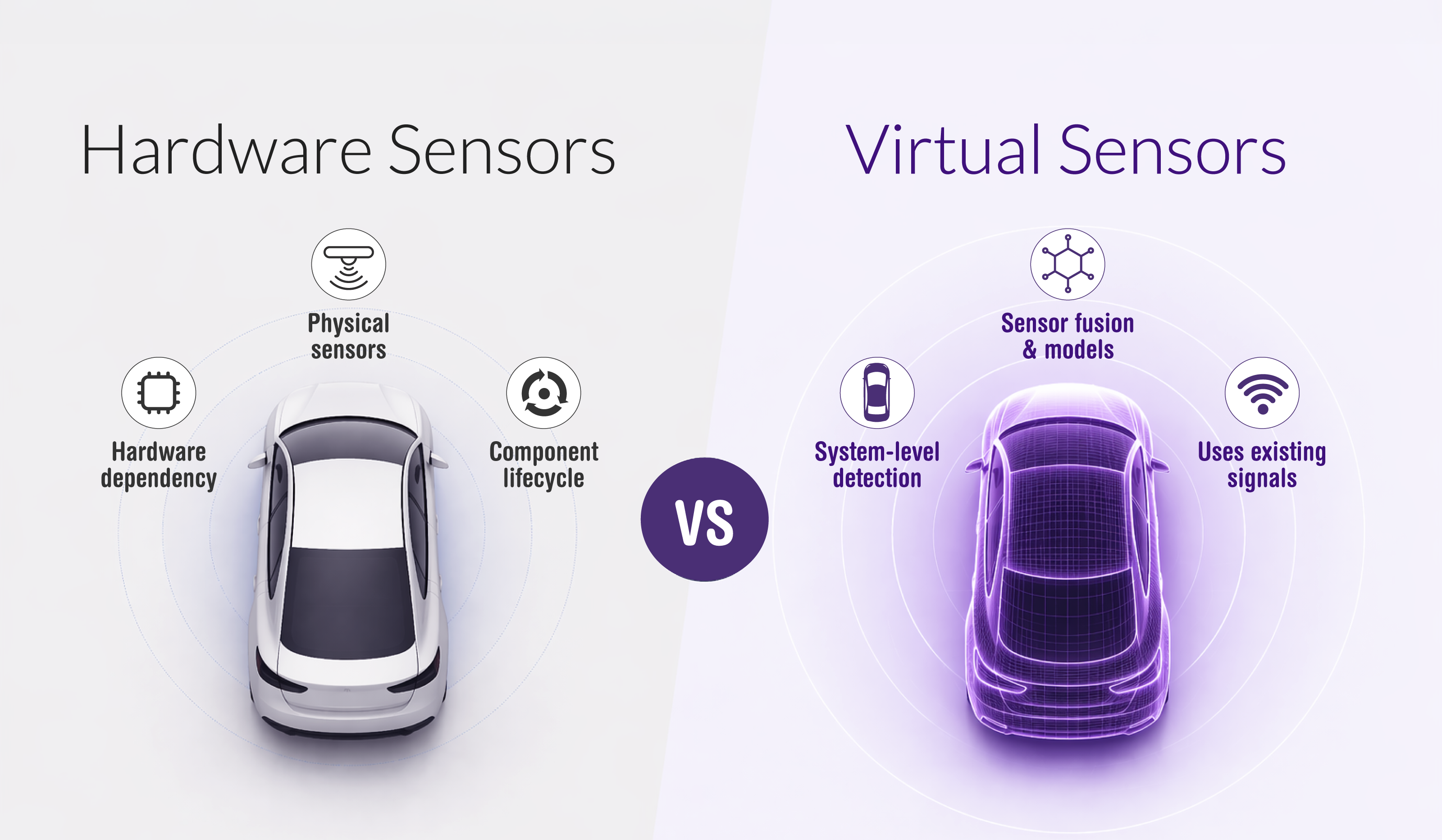
Both approaches enable vehicles to detect and respond to real-world conditions, but they do so in fundamentally different ways.
What are hardware sensors?
Hardware sensors are physical components designed to measure specific properties directly, such as pressure, temperature, motion, or position.
Each sensor is typically linked to a defined function within the vehicle system. Its performance depends on correct integration, calibration, and operation over time. As a result, sensing capability in hardware-based systems is closely tied to the components installed in the vehicle.
Hardware sensing is characterized by:
- Direct measurement of physical quantities
- Dedicated components for specific functions
- Dependencies on hardware integration, communication, and lifecycle
This approach has formed the foundation of modern automotive systems and remains essential in many applications.

What are virtual sensors?
Virtual sensors are software-based functions that estimate or detect conditions by interpreting existing vehicle signals using models and sensor fusion, rather than relying on direct physical measurement.
Instead of installing new hardware, virtual sensors use available signals—such as wheel speeds, accelerations, or system states—and interpret them through algorithms and models. This is enabled through sensor fusion, where multiple data sources are combined to understand system behavior.
Virtual sensing is characterized by:
- Detection based on deviations from expected system behavior rather than absolute measurements
- Use of existing vehicle signals, often combined through sensor fusion
- Evaluation relative to a learned reference state to ensure consistent detection across conditions
- Software-defined functionality that evolves without adding physical components
In this model, sensing becomes a system-level capability rather than a component.

The architectural difference
The key difference between hardware and virtual sensors lies in how sensing functionality is created and scaled.
Hardware-based sensing follows a component-driven approach, where new functionality is typically achieved by adding or extending physical components within the system.
Virtual sensing follows a data-driven approach, where new functionality is created by combining and interpreting signals that are already available.
This distinction affects how measurements are made, and how systems are designed and evolved over time.
Key differences in automotive systems
| Aspect | Hardware sensors | Virtual sensors |
| System design | Increase the number of physical components and interfaces in the vehicle | Build on existing systems, reducing the need for additional hardware |
| Scalability | Scales through physical integration | Scales through software deployment across platforms and fleets |
| Dependencies | Depend on sensors, wiring, power supply, and communication systems | Depend on signal availability, data quality, and model robustness |
| Lifecycle behavior | Performance affected by wear, aging, and service handling | Evolve through software updates and improvements in algorithms |
| Cost structure | Introduce per-vehicle cost and supply chain complexity | Leverage existing systems, reducing marginal cost and improving cost efficiency at scale |
Measurement and detection
Hardware and virtual sensors differ not only in how data is obtained, but in how system conditions are interpreted. Hardware sensors typically provide absolute measurements of a physical quantity, while virtual sensors focus on detecting deviations, patterns, or changes in system behavior.
In many automotive applications, the key requirement is not the exact value itself, but the ability to reliably detect and communicate a relevant condition. Advances in signal processing and sensor fusion have made it possible to achieve this through indirect methods.

From measurement to system understanding
The difference between hardware and virtual sensors is not only how data is obtained, but how sensing functionality is defined and extended over time.
By combining existing signals and evaluating deviations from learned system behavior, virtual sensors enable reliable detection without direct measurement. This allows functionality to be extended through software, using data already available within the vehicle.
As a result, sensing is no longer limited by what is physically installed, but by how effectively signals are interpreted and combined.
This shift—from component-based measurement to system-level understanding—means new sensing capabilities can be developed, deployed, and continuously improved through software rather than additional hardware.
In this model, sensing is no longer defined by installed components, but by how effectively vehicle data is interpreted.


.png?width=1024&height=1024&name=Slipperiness%20warning%20(1).png)
