
Los vehículos modernos dependen de los sensores para comprender su propio estado, su entorno y su rendimiento. Durante décadas, esta capacidad se ha construido mediante la incorporación de hardware: componentes específicos diseñados para medir determinadas propiedades físicas. A medida que los vehículos han evolucionado, también lo ha hecho el número de sensores, dando lugar a sistemas cada vez más complejos, donde la ampliación de funcionalidades ha implicado tradicionalmente añadir o extender componentes físicos.
Sin embargo, a medida que la industria avanza hacia los vehículos definidos por software, este modelo está empezando a cambiar. En lugar de añadir nuevo hardware para cada nueva función, cada vez es más posible extraer mayor valor de los datos que los vehículos ya generan. Aquí es donde la diferencia entre sensores físicos y sensores virtuales adquiere relevancia.
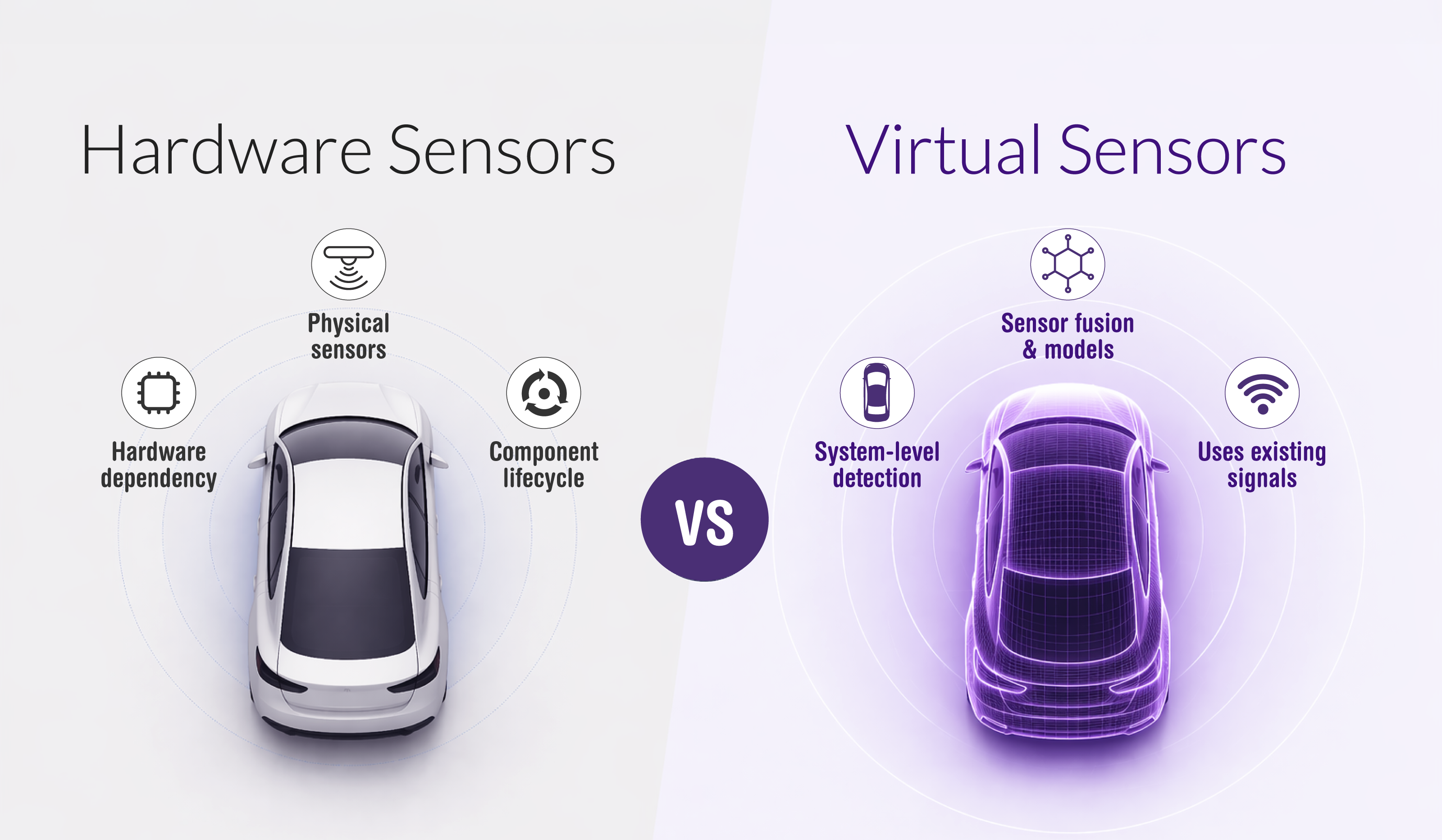
Ambos enfoques permiten que los vehículos detecten y respondan a condiciones del mundo real, pero lo hacen de formas fundamentalmente distintas.
¿Qué son los sensores físicos?
Los sensores físicos son componentes diseñados para medir directamente propiedades específicas, como presión, temperatura, movimiento o posición.
Cada sensor suele estar asociado a una función concreta dentro del sistema del vehículo. Su rendimiento depende de una integración, calibración y funcionamiento adecuados a lo largo del tiempo. Como resultado, la capacidad de detección en sistemas basados en hardware está estrechamente vinculada a los componentes instalados en el vehículo.
La detección mediante sensores físicos se caracteriza por:
- Medición directa de magnitudes físicas
- Componentes dedicados para funciones específicas
- Dependencia de la integración del hardware, las comunicaciones y el ciclo de vida de los componentes
Este enfoque ha constituido la base de los sistemas automotrices modernos y sigue siendo esencial en numerosas aplicaciones.

¿Qué son los sensores virtuales?
Los sensores virtuales son funciones basadas en software que estiman o detectan condiciones mediante la interpretación de señales existentes del vehículo utilizando modelos y fusión de sensores, en lugar de depender de una medición física directa.
En lugar de instalar nuevo hardware, los sensores virtuales utilizan señales disponibles, como velocidades de rueda, aceleraciones o estados del sistema, y las interpretan mediante algoritmos y modelos. Esto es posible gracias a la fusión de sensores, donde múltiples fuentes de datos se combinan para comprender el comportamiento del sistema.
La detección virtual se caracteriza por:
- Detección basada en desviaciones respecto al comportamiento esperado del sistema, en lugar de mediciones absolutas
- Uso de señales ya disponibles en el vehículo, a menudo combinadas mediante fusión de sensores
- Evaluación en relación con un estado de referencia aprendido para garantizar una detección consistente en distintas condiciones
- Funcionalidad definida por software que evoluciona sin necesidad de añadir componentes físicos
En este modelo, la capacidad de detección se convierte en una función del sistema en lugar de un componente específico.

La diferencia arquitectónica
La principal diferencia entre los sensores físicos y los sensores virtuales radica en cómo se crea y amplía la funcionalidad de detección.
La detección basada en hardware sigue un enfoque impulsado por componentes, donde las nuevas funcionalidades suelen lograrse mediante la incorporación o ampliación de componentes físicos dentro del sistema.
La detección virtual sigue un enfoque impulsado por datos, donde las nuevas funcionalidades se crean combinando e interpretando señales que ya están disponibles.
Esta diferencia afecta no solo a la forma en que se realizan las mediciones, sino también a cómo los sistemas se diseñan y evolucionan con el tiempo.
Diferencias clave en los sistemas automotrices
| Aspecto | Sensores físicos | Sensores virtuales |
| Diseño del sistema | Incrementan el número de componentes físicos e interfaces en el vehículo | Se basan en sistemas existentes, reduciendo la necesidad de hardware adicional |
| Escalabilidad | Escala mediante integración física | Escala mediante despliegues de software en plataformas y flotas |
| Dependencias | Dependen de sensores, cableado, alimentación eléctrica y sistemas de comunicación | Dependen de la disponibilidad de señales, la calidad de los datos y la robustez de los modelos |
| Comportamiento durante el ciclo de vida | El rendimiento se ve afectado por el desgaste, el envejecimiento y las intervenciones de mantenimiento | Evolucionan mediante actualizaciones de software y mejoras en los algoritmos |
| Estructura de costes | Introducen costes por vehículo y complejidad en la cadena de suministro | Aprovechan sistemas existentes, reduciendo el coste marginal y mejorando la eficiencia económica a escala |
Medición y detección
Los sensores físicos y los sensores virtuales difieren no solo en cómo se obtienen los datos, sino también en cómo se interpretan las condiciones del sistema. Los sensores físicos suelen proporcionar mediciones absolutas de una magnitud física, mientras que los sensores virtuales se centran en detectar desviaciones, patrones o cambios en el comportamiento del sistema.
En muchas aplicaciones automotrices, el requisito clave no es el valor exacto en sí mismo, sino la capacidad de detectar y comunicar de forma fiable una condición relevante. Los avances en el procesamiento de señales y la fusión de sensores han hecho posible lograrlo mediante métodos indirectos.

De la medición a la comprensión del sistema
La diferencia entre los sensores físicos y los sensores virtuales no radica únicamente en cómo se obtienen los datos, sino también en cómo se define y amplía la funcionalidad de detección con el tiempo.
Al combinar señales existentes y evaluar desviaciones respecto al comportamiento aprendido del sistema, los sensores virtuales permiten una detección fiable sin necesidad de medición directa. Esto hace posible ampliar funcionalidades mediante software, utilizando datos que ya están disponibles dentro del vehículo.
Como resultado, la capacidad de detección ya no está limitada por lo que está físicamente instalado, sino por la eficacia con la que las señales se interpretan y combinan.
Este cambio —de la medición basada en componentes a la comprensión a nivel de sistema— significa que nuevas capacidades de detección pueden desarrollarse, desplegarse y mejorarse continuamente mediante software en lugar de hardware adicional.
En este modelo, la capacidad de detección ya no está definida por los componentes instalados, sino por la eficacia con la que se interpretan los datos del vehículo.



